第7章带约束的优化问题
带约束条件的最优化问题,约束条件一般分为两种,一种是等式约束;另一种是不等式约束。对于第一种等式约束的优化问题,可以直接利用拉格朗日乘子法去获得最优解;对于不等式约束的优化问题,可以转化为Karush–Kuhn–Tucker conditions(KKT条件)下应用拉格朗日乘数法求解。两种情况都应用拉格朗日乘数法,给出优化问题的必要条件。
7.1 拉格朗日乘数法
拉格朗日乘数法(又称为拉格朗日乘子法),就是求函数 在等式约束函数
在等式约束函数 或不等式约束函数
或不等式约束函数 的约束条件下的极值的方法。其主要思想是引入一个新的参数λ(即拉格朗日乘子),将约束条件函数与原函数联系到一起,配成与变量数量相等的等式方程,从而求出原函数极值的必要条件。
的约束条件下的极值的方法。其主要思想是引入一个新的参数λ(即拉格朗日乘子),将约束条件函数与原函数联系到一起,配成与变量数量相等的等式方程,从而求出原函数极值的必要条件。
假设向量x=  ,目标函数为f(x),等式约束函数为h(x),不等式约束函数为g(x)
,目标函数为f(x),等式约束函数为h(x),不等式约束函数为g(x)
求等式约束条件下的极值问题:


利用拉格朗日乘数法构造拉格朗日乘子函数:

其中参数u称为拉格朗日乘子。利用拉格朗日乘数法把有约束的极值问题,转换为无约束的极值问题。对拉格朗日乘子函数的所有自变量(x及参数u)求导,并令其为0,就可得到函数的候选极值点。


由式(7.2)可知,在极值点目标函数的梯度是约束函数梯度的倍数,即这两个梯度是平行的关系,如图7-1所示。如果有多个等式约束函数,目标函数的梯度是约束函数梯度的线性组合。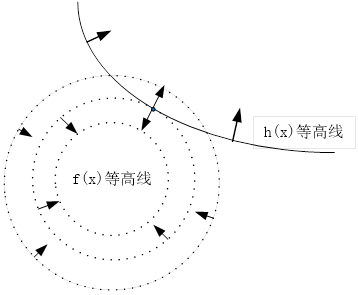
图7-1 f(x)的等高线与约束函数h(x)等高线在切点的梯度互相平行
【说明】f(x)的梯度是等高线的法向量。以二维空间为例,假设而为函数f(x,y)
根据微分定义:

 表示函数f(x)等高线的方向,当
表示函数f(x)等高线的方向,当 时,
时,
即等高线的方向与f(x)的梯度互相垂直。
例1:利用拉格朗日乘数法求如下极值问题


(1)构建拉格朗日乘子函数

对自变量及乘子变量求导,并令其为0,可得如下方程组:



解得:
 或
或
目标函数 的海塞矩阵为:
的海塞矩阵为:

为正定矩阵,故目标函数是凸函数,有极小值。极值点与等高线之间的位置见图7-2所示
图7-2 极值点的位置示意图
实现图72-的python代码:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
import numpy as np import matplotlib.pyplot as plt %matplotlib inline plt.figure(figsize=(10, 6)) n = 256 X = np.linspace(-3, 3, n) Y = np.linspace(-3, 3, n) X, Y = np.meshgrid(X, Y) Z=X**2+ Y**2 Z1=X*Y-3 # 填充等高线的颜色, 8是等高线分为几部分 plt.contour(X, Y, Z, 8, alpha = 0.75, cmap = plt.cm.hot) plt.contour(X, Y, Z1>0, 8, alpha = 0.75, cmap = plt.cm.hot) plt.text(np.sqrt(3),np.sqrt(3),'*') plt.text(-np.sqrt(3),-np.sqrt(3),'*') |
求不等式约束条件下的极值问题:
前面介绍了等式约束的极值问题,通常面对更多的是不等式条件约束的情况,对这种情况,其取得极值的必要条件为KKT条件(非充分条件,如果优化问题为优化问题,则是充分条件)。

利用拉格朗日乘数法构造拉格朗日乘子函数:

其中参数 称为拉格朗日乘子,
称为拉格朗日乘子,
对不等式约束,极值点与不等式构成的区域有2种情况,如图7-3所示。
(1)极值点在g(x)<0区域内,如图7-3(a),这就是没有限制条件下的极值点,不等式约束不起作用,可以直接最小化目标函数,求得极值点 ,由此可得:
,由此可得:

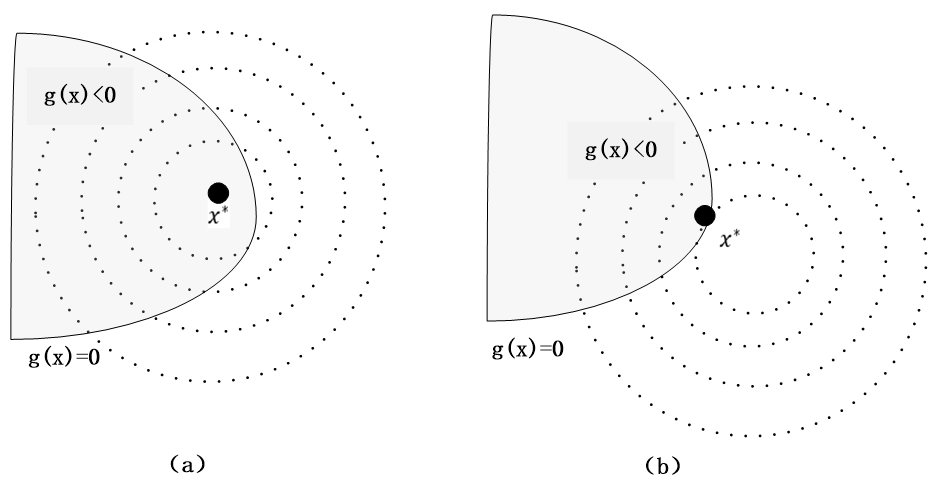
图7-3 极值点在约束区域的位置
(2)极值点在g(x)=0上,如图7-3(b)所示。 这种情况,约束条件起作用,所以 ,g(x)=0。这样问题就相当于等式约束问题,由此可得极值点满足:
,g(x)=0。这样问题就相当于等式约束问题,由此可得极值点满足:  由图7-1可知,梯度
由图7-1可知,梯度 与梯度
与梯度 平行且方向相反,为此需要
平行且方向相反,为此需要 ,即有:
,即有:

综合以上两种情况,就得到在不等式约束的条件下,获取极值点的必要条件为:

这实际上就是KKT条件的核心内容。
接下来简单介绍KKT条件的完整信息。
例2:求下例问题的极值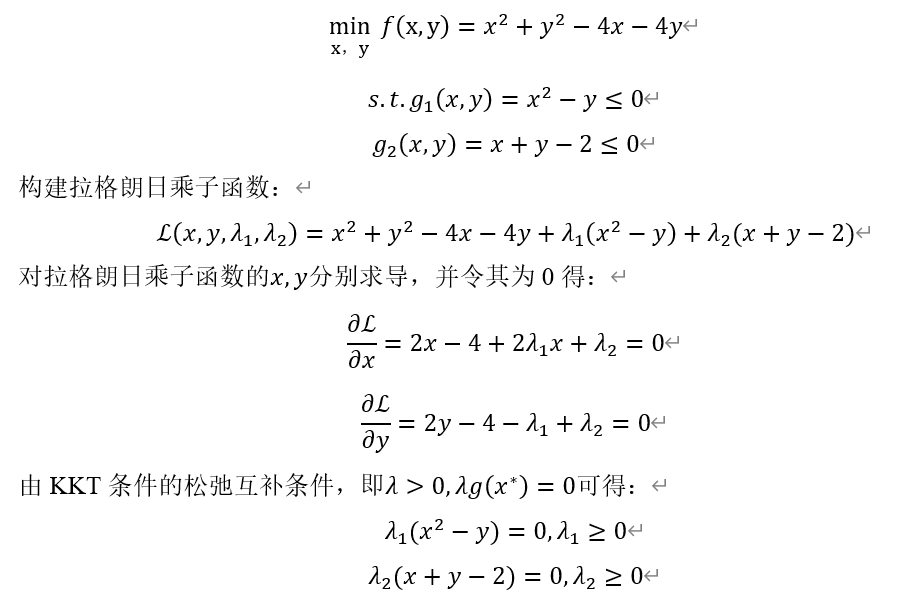
目标函数为凸函数,解得最小值为:x=y=1
目标函数最优点的位置如图7-4所示。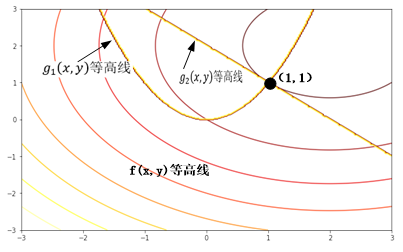
图7-4 目标函数与约束函数等高线及最优点位置
7.2 KKT条件
KKT条件是求带等式、不等式约束问题极值的一阶必要条件,是拉格朗日乘数法的推广,对于如下的优化问题:
【说明】KKT条件只是取得极值的必要条件,而非充分条件。如果是一个凸优化问题,KKT条件是取得极值的充分必要条件。