文章目录
6.2奇异值分解
有关奇异值分解的几个问题
(1)可分解任何形状的矩阵?
(2)如何分解?分解步骤如何?
(3)特征值的信息量如何度量?
(4)如何利用特征值实现矩阵的近似表示?
(5)奇异值分解还存在哪些不足?如何克服这些不足?
下面就这些问题逐一进行说明
6.2.1 分解矩阵的形状
特征值分解的矩阵都是方阵,有些还需要是对称方阵。奇异值分解,没有这个限制,非方阵也可以。所以奇异值分解的应用非常广泛。
6.2.2 矩阵奇异值分解推导详细过程
根据上节特征值分解可知,对称矩阵A可以分解为:

其中矩阵Q是矩阵A的正交化的特征向量, 为对角矩阵,其值为A的特征值。
为对角矩阵,其值为A的特征值。
由式(6.3)可得:

正交矩阵Q由A的一组特征向量构成,即;
![Q=[x_1,x_2,\cdots,x_n]](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_93938b91da7f312a1d0f1d659df6d89a.gif)
不妨把![[x_1,x_2,\cdots,x_n]](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_5b24c69c53879fbd5f252ac017989773.gif) 作为一组正交基,因此特征向量x可用这组正交基表示:
作为一组正交基,因此特征向量x可用这组正交基表示:
![x=[x_1,x_2,\cdots,x_n][a_1,a_2,\cdots,a_n ]^T](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_54da61aa5df5c2c65fb17bb909f55636.gif)
由式(6.3)可得:
我们可以以2x2矩阵为例,把这个过程用几何图形表示如下: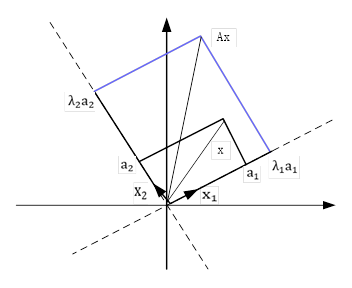
整个变换过程中,矩阵A特征值分解的本质是把向量x由一组正交基映射到另一组正交基上。
由此我们得到启发,对于一般矩阵A,其形状为mxn,如果能实现这个过程,是否也可以进
行类似于特征值分解?为此,我们假设n为空间已找到一组正交交基:
![[v_1,v_2,\cdots,v_n]](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_7b34aa5991785b3ab206ef9057dc99b9.gif)
矩阵A把这组正交基映射为:
![[Av_1,Av_2,\cdots,Av_n]](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_3d5b0cb07ab9017032eed69d58a5addb.gif)
如果要使映射后的这组向量成为一组正交向量,则需要满足如下条件,当i≠j时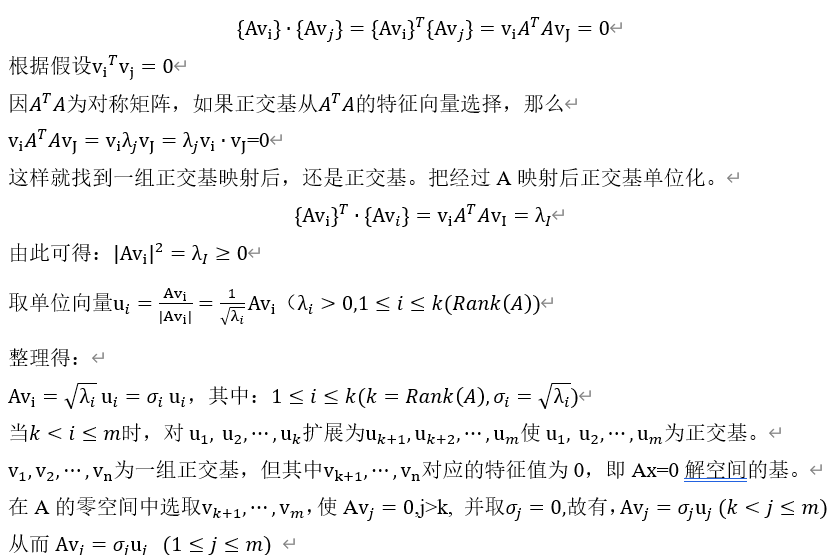
由此可得:
6.2.3 SVD的简单实例
例1: 设 ,对矩阵A进行奇异值分
,对矩阵A进行奇异值分
解: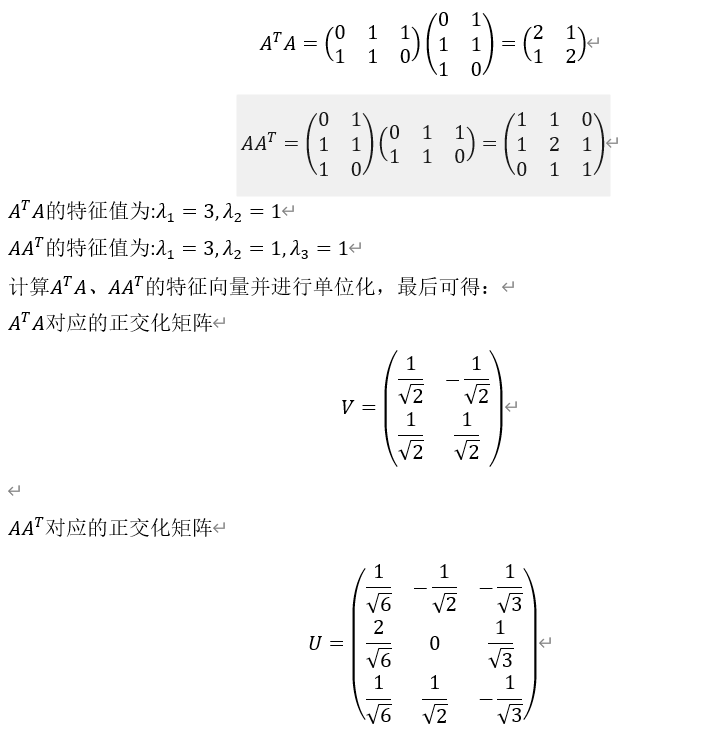
对角矩阵
可以验证

SVD分解矩阵A的步骤
(1) 求 的特征值和特征向量,用单位化的特征向量构成 U。
的特征值和特征向量,用单位化的特征向量构成 U。
(2) 求 的特征值和特征向量,用单位化的特征向量构成 V。
的特征值和特征向量,用单位化的特征向量构成 V。
(3) 将或者的特征值求平方根,然后构成 Σ。
3)用python实现这个实例
|
1 2 3 4 5 6 7 8 9 |
import numpy as np #generate a 3*2 matrix A = np.array([[0,1],[1,1],[1,0]]) #d returns as numpy.ndarray U,d,V = np.linalg.svd(A, full_matrices=True) print('A:',A) print('U:',U) print('V:',V) print('d:',d) |
打印结果:
A: [[0 1]
[1 1]
[1 0]]
U: [[-4.08248290e-01 7.07106781e-01 5.77350269e-01]
[-8.16496581e-01 7.45552182e-17 -5.77350269e-01]
[-4.08248290e-01 -7.07106781e-01 5.77350269e-01]]
V: [[-0.70710678 -0.70710678]
[-0.70710678 0.70710678]]
d: [1.73205081 1. ]
进行还原
|
1 2 3 4 5 6 7 |
#把d转换为对角矩阵 D = np.zeros(6).reshape(3,2) for i in range(len(d)): D[i][i] = d[i] D[2][i] = 0 print('P*D*Q:',np.dot(U,np.dot(D,V))) |
运行结果
P*D*Q: [[ 1.02120423e-16 1.00000000e+00]
[ 1.00000000e+00 1.00000000e+00]
[ 1.00000000e+00 -2.11898069e-16]]
奇异值分解函数:
np.linalg.svd(a, full_matrices=True, compute_uv=True, hermitian=False)
参数说明:
a : 是一个形如(M,N)矩阵
full_matrices:的取值是为False或者True,默认值为True,这时u的大小为(M,M),vh的大小为(N,N) 。否则u的大小为(M,K),vh的大小为(K,N) ,K=min(M,N)。
compute_uv:取值是为False或者True,默认值为True,表示计算u,s,vh。为0的时候只计算s
hermitian:如果为 True,则假定 a 为 Hermitian(如果为实值,则为对称),从而可以更有效地找到奇异值。默认为False
返回值:
u: { (…, M, M), (…, M, K) } 数组
s: (…, K) 数组
vh: { (…, N, N), (…, K, N) } 数组
其中s是对矩阵a的奇异值分解。s除了对角元素不为0,其他元素都为0,并且对角元素从大到小排列。
s中有n个奇异值,一般排在后面的比较接近0,所以仅保留比较大的r个奇异值。
6.2.4 特征值的信息量如何度量?
在奇异值分解中,较大的奇异值会决定原矩阵的“主要特征”,如何根据A的奇异值分解来度量特征值的信息量。可以用矩阵A的F-范数的平方来
 衡量。
衡量。
假设矩阵A的秩为k,矩阵U的前k个正交向量为![[u_1,u_2,\cdots,u_k]](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_8b50705cfc07cea81ceb9a5d7b6e41b5.gif) ,矩阵V的前k个正交向量为
,矩阵V的前k个正交向量为![[v_1,v_2,\cdots,v_k]](http://www.feiguyunai.com/wp-content/plugins/latex/cache/tex_03a5b82985c7a666ebaf3df2f688baea.gif) ,内积
,内积


具体计算时一般选择前 之和与的比是否达到一个值(如90%)。
之和与的比是否达到一个值(如90%)。
6.2.5矩阵的近似表示
奇异值与特征值得意义类似,在奇异值矩阵中也是按照从大到小排列,而且奇异值的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上的比例。也就是说,我们也可以用最大的k个的奇异值和对应的左右奇异向量来近似描述矩阵。

这个压缩或还原过程,用下图可表示更直观: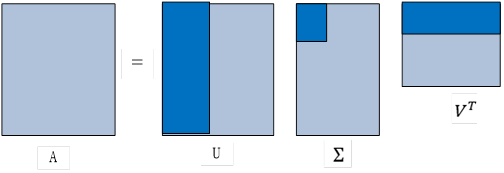
由于这个重要的性质,SVD可以用于PCA降维,来做数据压缩和去噪。也可以用于推荐算法,将用户和喜好对应的矩阵做特征分解,进而得到隐含的用户需求来做推荐。同时也可以用于NLP中的算法,比如潜在语义索引。
6.2.6 SVD的改进算法
数据方面的改进:
对数据进行规范化
算法方面的改进:
SVD针对的矩阵A,很多是稀疏矩阵,其中有很多0,尤其在推荐需求的场景中。SVD通过过分依赖已有数据,这容易造成过拟合。为改进这个不足,人们开发出SVD的改进算法,
如RSVD、SVD++等等,大家有兴趣可参考相关论文。